


建大仁科傾角傳感器
建大仁科傾角傳感器
1.產品簡介
1.1產品概述
傾角變送器是一款標準工業雙軸傾角儀,通過檢測使用環境中的傾斜角度來判斷設備的傾斜狀態,可長期在戶外使用。廣泛應用于工業傾角測量及危房監測、古建筑保護監測、橋梁橋塔測斜、隧道監測、大壩監測、稱重系統傾斜補償、鉆井傾斜控制等行業,安全可靠,外觀美觀,安裝方便。
1.2功能特點
- 采用卡爾曼濾波算法,使設備采集的角度值精確、穩定。
- 具有較寬的角度測量范圍,輸出信號線性度好,可滿足絕大多數環境下使用。
- 采用專有的485電路,標準ModBus-RTU 通信協議,通信地址及波特率可設置。
- 5~30V 直流寬電壓范圍供電。
- 具有測量范圍寬、線形度好、使用方便、便于安裝、傳輸距離遠等特點。
1.3 技術參數
直流供電(默認) | DC 5-30V |
較大功耗 | ≤0.15W |
工作溫度 | -40℃—60℃ |
量程 | X軸-180°~180° Y軸-90°~90° |
分辨率 | 0.01° |
精度 | 靜態精度0.05°,動態精度0.1° |
響應時間 | <1S |
防護等級 | IP65 |
默認線纜長度 | 60cm,線纜長度可按要求定制 |
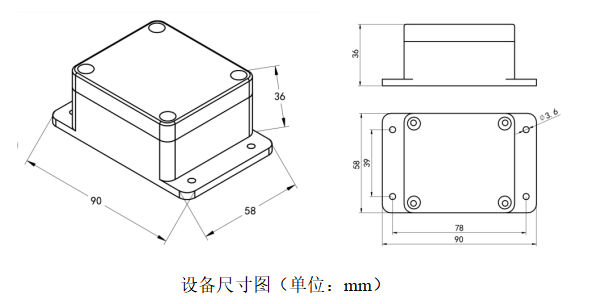
外形尺寸 | 90*58*36mm |
輸出信號 | RS485(Modbus協議) |
1.4產品選型
RS- |
| 公司代號 | ||
| DIP- |
| 傾角變送器 | |
| N01- |
| RS485(Modbus-RTU協議) | |
| -1 | 殼體 | ||
2.外形尺寸及安裝方法
2.1外形尺寸
2.2安裝方法
模塊默認安裝方向為水平安裝,當模塊需要垂直放置時,可以用垂直安裝設置。
垂直安裝方法:垂直安裝時,把模塊繞 X 軸旋轉 90°垂直放置,在上位機配置欄里面“安裝方向”選項中選擇“垂直”。設置完成后要進行校準才能使用。
垂直安裝時,X軸為水平向左,Y軸為垂直于墻面向里。

水平安裝(俯視角度) 垂直安裝
- 使用方法
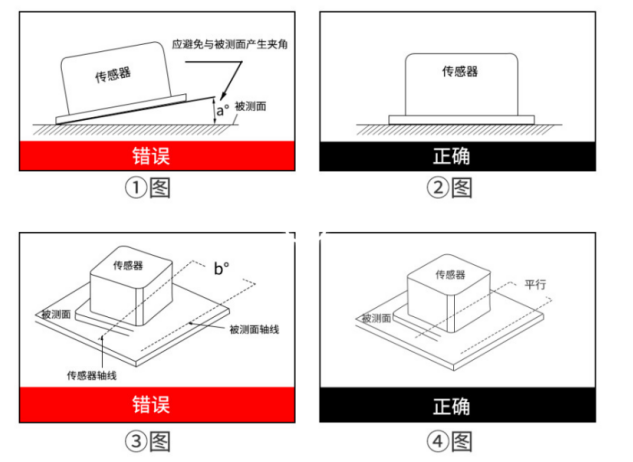
請按照正確的安裝方法進行傾角變送器的安裝,不正確的安裝會導致測量誤差,尤其注意兩“面”和兩“線”:
- 傾角變送器的安裝面與被測量面固定必須緊密、平整、穩定,如果安裝面出現不平容易造成變送器測量夾角誤差。
- 傾角變送器軸線與被測量軸線必須平行,兩軸線盡可能不要產生夾角。
(3)將設備正放在桌面上,向右為 X 軸,向上為 Y 軸。旋轉的方向按右手法則定義,即右手大拇指指向X軸向,四指彎曲的方向即為繞該軸旋轉的方向。X 軸角度即為繞X軸旋轉方向 ,Y 軸角度即為繞 Y 軸旋轉方向的角度。
4.設備安裝說明
4.1 設備安裝前檢查
設備清單:
■傾角變送器設備1臺
■合格證、保修卡
■安裝螺絲包
4.2 接口說明
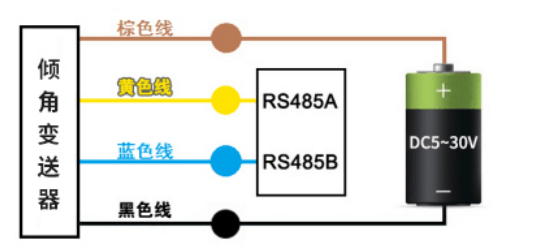
寬電壓電源輸入5~30V均可。485信號線接線時注意A、B兩條線不能接反,總線上多臺設備間地址不能沖突。
4.3 接線說明
線色 | 說明 | 備注 |
棕色 | 電源正 | 5~30V DC |
黑色 | 電源地 | GND |
yellow | 485-A | 485-A |
藍色 | 485-B | 485-B |
5.配置軟件安裝及使用
5.1 軟件選擇
打開資料包,選擇“調試軟件”---“485參數配置軟件”,找到 打開即可。
打開即可。
5.2 參數設置
①、選擇正確的COM口(“我的電腦—屬性—設備管理器—端口”里面查看COM端口),下圖列舉出幾種不同的485轉換器的驅動名稱。

②、單獨只接一臺設備并上電,點擊軟件的測試波特率,軟件會測試出當前設備的波特率以及地址,默認波特率為4800bit/s,默認地址為0x01。
③、根據使用需要修改地址以及波特率,同時可查詢設備的當前功能狀態。
④、如果測試不成功,請重新檢查設備接線及485驅動安裝情況。

6.通信協議
6.1通訊基本參數
編 碼 | 8位二進制 |
數據位 | 8位 |
奇偶校驗位 | 無 |
停止位 | 1位 |
錯誤校驗 | CRC(冗余循環碼) |
波特率 | 可設,出廠默認為4800bit/s |
6.2 數據幀格式定義
采用Modbus-RTU 通訊規約,格式如下:
初始結構 ≥4 字節的時間
地址碼 = 1 字節
功能碼 = 1 字節
數據區 = N 字節
錯誤校驗 = 16 位CRC 碼
結束結構 ≥4 字節的時間
地址碼:為變送器的地址 (出廠默認0x01)。
功能碼:主機所發指令功能指示。
數據區:數據區是具體通訊數據,注意16bits數據高字節在前!
CRC碼:二字節的校驗碼。
主機問詢幀結構:
地址碼 | 功能碼 | 寄存器起始地址 | 寄存器長度 | 校驗碼低字節 | 校驗碼高字節 |
1字節 | 1字節 | 2字節 | 2字節 | 1字節 | 1字節 |
從機應答幀結構:
地址碼 | 功能碼 | 有效字節數 | 數據一區 | 數據二區 | 數據N區 | 校驗碼低字節 | 校驗碼高字節 |
1字節 | 1字節 | 1字節 | 2字節 | 2字節 | 2字節 | 1字節 | 1字節 |
6.3 寄存器地址
寄存器地址 | PLC或組態地址 | 內容 | 操作 | 定義說明 |
0000H | 40001 (十進制) | x軸角度 | 只讀 | 讀取x軸傾斜角度,擴大一百倍 |
0001 H | 40002 (十進制) | y軸角度 | 只讀 | 讀取y軸傾斜角度,擴大一百倍 |
0050 H | 40081 (十進制) | x軸校準 | 讀寫 | 16位有符號整,擴大一百倍 |
0051 H | 40082(十進制) | y軸校準 | 讀寫 | 16位有符號整,擴大一百倍 |
0052 H | 40083 (十進制) | 安裝方式 | 讀寫 | 65H:水平安裝(默認) 66H:垂直安裝 |
0053 H | 40084 (十進制) | 傾角模塊校準 | 只寫 | 67H:零點校準 |
07D0 H | 42001 (十進制) | 設備地址 | 讀寫 | 1~254(出廠默認1) |
07D1 H | 42002 (十進制) | 設備波特率 | 讀寫 | 0代表2400 1代表4800 2代表9600 |
6.4 通訊協議示例以及解釋
6.4.1舉例:讀取設備地址0x00的實時值
問詢幀
地址碼 | 功能碼 | 起始地址 | 數據長度 | 校驗碼低字節 | 校驗碼高字節 |
0x01 | 0x03 | 0x00 0x00 | 0x00 0x01 | 0x84 | 0x0A |
應答幀
地址碼 | 功能碼 | 返回有效字節數 | x軸角度 | 校驗碼低字節 | 校驗碼高字節 |
0x01 | 0x03 | 0x02 | 0x04 0x7E | 0x3A | 0xA4 |
x軸角度計算:
x軸角度:047E H(16進制)= 1150=>x軸角度= 11.50°
6.4.2舉例:讀取設備地址0x01的y軸角度實時值
問詢幀
地址碼 | 功能碼 | 起始地址 | 數據長度 | 校驗碼低字節 | 校驗碼高字節 |
0x01 | 0x03 | 0x00 0x01 | 0x00 0x01 | 0xD5 | 0xCA |
應答幀
地址碼 | 功能碼 | 返回有效字節數 | Y軸角度 | 校驗碼低字節 | 校驗碼高字節 |
0x01 | 0x03 | 0x02 | 0x0A 0xC8 | 0xBF | 0x72 |
Y軸角度計算:
Y軸角度:0AC8 H(16進制)= 2760=>Y軸角度= 27.60°
6.4.3舉例:讀取設備地址0x52的安裝方式
問詢幀
地址碼 | 功能碼 | 起始地址 | 數據長度 | 校驗碼低字節 | 校驗碼高字節 |
0x01 | 0x03 | 0x00 0x52 | 0x00 0x01 | 0x25 | 0xDB |
應答幀
地址碼 | 功能碼 | 返回有效字節數 | 安裝方式 | 校驗碼低字節 | 校驗碼高字節 |
0x01 | 0x03 | 0x02 | 0x00 0x66 | 0x38 | 0x6E |
66H表示安裝方式為垂直安裝
6.4.4舉例:使用0x53寄存器進行設備校準
問詢幀
地址碼 | 功能碼 | 變量地址 | 寫入數據 | 校驗碼低字節 | 校驗碼高字節 |
0x01 | 0x06 | 0x00 0x53 | 0x00 0x67 | 0x38 | 0x31 |
應答幀
地址碼 | 功能碼 | 變量地址 | 返回數據 | 校驗碼低字節 | 校驗碼高字節 |
0x01 | 0x06 | 0x00 0x53 | 0x00 0x67 | 0x38 | 0x31 |
將0067寫入0x53寄存器完成設備的零點校準
7.常見問題及解決辦法
7.1 設備無法連接到PLC或電腦
可能的原因:
1)電腦有多個COM口,選擇的口不正確。
2)設備地址錯誤,或者存在地址重復的設備(出廠默認全部為0x01)。
3)波特率,校驗方式,數據位,停止位錯誤。
4)485總線有斷開,或者A、B線接反。
5)設備數量過多或布線太長,應就近供電,加485增強器,同時增加120Ω終端電阻。
6)USB轉485驅動未安裝或者損壞。
7)設備損壞。
7.2 注意
當Y軸在90°附近時,為設備歐拉角盲區,此時X輸出角度不準,安裝使用是應注意避開此角度。
















