 智慧城市網(wǎng)
智慧城市網(wǎng)
技術文章
西門子模塊6ES7 131-6BH01-0BA0單價
閱讀:509 發(fā)布時間:2021-5-8西門子模塊6ES7 131-6BH01-0BA0單價
西門子中國*代理商 西門子中國*總代理商 西門子*代理商 西門子*一級代理商 西門子*總代理商 西門子PLC*代理商 西門子變頻器*代理商 西門子*電纜代理商 西門子*伺服系統(tǒng)代理商
提示:除了以上方式,您也許會想到Modbus通信和自由口通信。這兩種方式可以用于S7-200之間的數(shù)據(jù)交換,但是不是我們*的常用通信方式。因為使用Modbus通信和自由口通信時您需要編寫大量的程序,并無法很好的保證通信的準確性和實時性,Modbus 通信和自由口通信是常用于S7-200CPU與第三方設備或儀表之間的數(shù)據(jù)交換方式。
1.1 網(wǎng)絡讀寫(PPI)通信
PPI 協(xié)議是S7-200的主從通信協(xié)議.利用此方式可以實現(xiàn)S7-200與S7-200間的數(shù)據(jù)交換。這種通信方式利用CPU集成通信口即可實現(xiàn),配置簡單。通信中,主站設備將請求發(fā)送至從站設備,然后從站設備進行響應。具體如下圖所示:

西門子模塊6ES7 131-6BH01-0BA0單價
實現(xiàn)網(wǎng)絡讀寫(PPI)通信可以使用以下兩種方法:
*,使用Step 7 Micro/Win編程軟件中指令向?qū)е械腘ETR/NETW向?qū)В?/p>
河南兆陽自動化科技有限公司銷售西門子千萬余產(chǎn)品 盡您來詢價訂貨
采購 ,歡迎您來兆陽公司,謝謝您的光臨!您的合作是我蕞大的榮幸!
Thank you very much!
河南兆陽自動化科技有限公司
:邵工
具體方法和相關注意事項請參考《西門子 S7-200?LOGO!?SITOP 參考》(更新版)S7-200 PLC->通信->網(wǎng)絡讀寫(PPI)通信。
第二,使用NETR/NETW指令,需要客戶自己編寫程序?qū)崿F(xiàn)。
詳細的編程設置及例子程序請參考《S7-200可編程控制器系統(tǒng)手冊》第6章S7-200指令集->通信指令->網(wǎng)絡讀寫指令。
提示: NETR/NETW向?qū)褂煤唵危挥么罅烤幊蹋恍璋凑障驅(qū)Р襟E設置參數(shù),因此不易出錯。*采用向?qū)У姆椒▽崿F(xiàn)網(wǎng)絡讀寫(PPI)通信。
使用網(wǎng)絡讀寫(PPI)通信時需要注意以下幾點:
*,只有PPI主站需要配置或編程,從站不需要配置;
第二,主站既可以讀寫從站的數(shù)據(jù),也可以讀寫另一個主站的數(shù)據(jù);
第三,在一個PPI網(wǎng)絡中,與一個從站通信的主站的個數(shù)沒有限制,但是一個網(wǎng)絡中主站的個數(shù)不能超過32個;
第四,由于S7-200 CPU集成的通信口是非隔離的。因此在一個PPI通信網(wǎng)絡中,一個網(wǎng)段的距離不能超過50米。如果通訊距離超出50m,應在通信網(wǎng)絡中使用中繼器。如下所示:
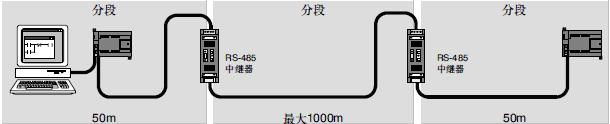
提示:在上圖中,通常擴展一個中繼器可延長通信網(wǎng)絡50米,但如果擴展一對中繼器,并且它們之間沒有任何節(jié)點,中繼器之間的距離可達到1000米。
在網(wǎng)絡中使用中繼器的具體方法可參考《S7-200可編程控制器系統(tǒng)手冊》第7章 網(wǎng)絡通信->網(wǎng)絡的建立->在網(wǎng)絡中使用中繼器
在自動化控制系統(tǒng)中,為了對風機和泵類負載更好的控制,我們經(jīng)常會使用到變頻器,通過改變頻率來實現(xiàn)對電機轉速的控制。在小型的自動化項目解決方法中,常用的西門子PLC是S7-200系列,如果使用變頻器控制,需要將S7-200和變頻器之間進行通訊。本文下面以西門子PLC S7-200系列和西門子變頻器MM420系列為例,說明它們之間通訊的方法。
二、西門子PLC與西門子變頻器通訊方式
用戶在使用西門子PLC S7-200系列和西門子變頻器MM420系列時,需要按照如下的方法進行配置:
1. 對于西門子PLC S7-200,需要使用編程軟件STEP 7 MicroWIN V4.0 SP9,在“設置PC/PG接口”中,選擇“PC/PPI cable”項,這是為了下載程序時,使用S7-200的編程電纜;
2. 在編程軟件STEP 7 MicroWIN V4.0 SP9的“庫”中,添加USS協(xié)議庫文件;添加方式可以選中“庫”,然后右擊鼠標,選擇“添加/刪除庫”,然后選擇相應的庫文件進行添加;
3. 使用通訊電纜將西門子PLC S7-200與西門子變頻器MM420進行連接,從而實現(xiàn)USS通訊。連接方式為S7-200CPU端口的3和8管腳,對應MM420的14和15管腳;
4. 在西門子變頻器MM420端設置好相關參數(shù):P0700(命令源);P1000(頻率設定值);P2010[2](USS通訊波特率);P2011[2](USS地址)等;
5. 在S7-200的編程軟件STEP 7 MicroWIN V4.0 SP9中,調(diào)用USS庫中的“USS_INIT”功能塊,對USS通訊進行初始化;
6. 在S7-200的編程軟件STEP 7 MicroWIN V4.0 SP9中,調(diào)用USS庫中的“USS_CTRL”功能塊,對變頻器運行時需要的參數(shù)進行設置;
7. 在S7-200的編程軟件STEP 7 MicroWIN V4.0 SP9的“程序塊”的“庫”中,為USS功能塊分配地址,選擇“建議地址”后,點擊“確定”;
8. 使用S7-200編程電纜編譯并下載程序;
9. 下載程序后,對程序中的參數(shù)進行監(jiān)控,例如:在狀態(tài)表中,將“RUN”置為1,并且設定相應的“速度給定”,此時變頻器就可以按照相應的頻率工作了。
三、小結
綜上所述,本文介紹了西門子PLC S7-200系列和西門子變頻器MM420系列的通訊方法,用戶可以參照上述內(nèi)容進行操作。如果需要更多的了解西門子PLC和西門子變頻器的相關用法,請,我們會更好的提供相關。
西門子S7-200PLC在汽車制造廠檢測線上的應用
一、引言
在汽車制造廠的檢測線上,由于新出廠的車輛需要在啟動狀態(tài)下進行檢測。此時廠房內(nèi)會聚集大量的汽車尾氣,從而對工作人員身體造成損害。因此在汽車制造廠的檢測線上,都會裝配有汽車尾氣處理系統(tǒng),目的是將廠房內(nèi)的大量尾氣排出,使得廠房內(nèi)保持潔凈的空氣。在江鈴汽車制造廠的尾氣處理系統(tǒng)中,自動控制部分使用到了西門子S7-200PLC,使整個系統(tǒng)穩(wěn)定流暢的運行。
二、控制系統(tǒng)組成
控制系統(tǒng)的硬件部分核心是西門子S7-200系列PLC,采用CPU226CN,AC/DC/Relay型號;擴展模塊使用2個EM223CN,分別為8DI/8Relay,和4DI/4Relay。
控制系統(tǒng)的軟件采用V4.0 STEP 7 MicroWIN SP6,I/O分配如下:
輸入 | 信號說明 | 輸出 | 信號說明 |
I0.0 | 起始位置準備 | Q0.0 | 自動控制 |
I0.1 | 急停 | Q0.1 | A位輸出 |
I0.2 | 按鈕輸入1 | Q0.2 | B位輸出 |
I0.3 | 按鈕輸入2 | Q0.3 | C位輸出 |
I0.4 | 行進準備 | Q0.4 | D位輸出 |
I0.5 | 緩沖信號1 | Q0.5 | 速度模式1 |
I0.6 | 緩沖信號2 | Q0.6 | 速度模式2 |
I0.7 | 停止信號 | Q0.7 | 速度模式3 |
I1.0 | 結束信號 | Q1.0 | 正向運行 |
I1.1 | 到A位 | Q1.1 | 反向運行 |
I1.2 | 到B位 | Q2.0 | 驅(qū)動1 |
I1.3 | 到C位 | Q2.1 | 驅(qū)動2 |
I1.4 | 到D位 | Q2.2 | 驅(qū)動3 |
I1.5 | 速度信號 | Q2.3 | 驅(qū)動4 |
I2.1 | 加速信號 | Q2.4 | 驅(qū)動5 |
I2.2 | 減速信號 | Q2.5 | 驅(qū)動6 |
I2.3 | 自動/手動 | Q2.6 | 驅(qū)動7 |
I2.4 | 移動A | Q2.7 | 驅(qū)動8 |
I2.5 | 移動B | Q3.0 | 模式指示 |
I2.6 | 移動C |
|
|
I2.7 | 移動D |
|
|
I3.0 | A位準備 |
|
|
I3.1 | B位準備 |
|
|